近年来,自动驾驶、网联技术、新能源、共享出行是汽车工业的发展方向,尤其是自动驾驶,在全球和中国获得了非常多的技术关注和资本支持。为了应对这个趋势,西门子工业软件在过去十年累计投入超过100亿美元,做了很多技术研发的努力,包括并购一些公司,包括TASS International。基于这些工作,Siemens能够提供智能网联新能源车的整体解决方案。其中,TASS的主要技术领域包括两个方面,一个是仿真技术,一个是测试和工程咨询服务。
本文与大家交流的主题是基于模型的ADAS和自动驾驶系统开发和测试方法论。要配合自动驾驶汽车的性能开发,我们必须遵循从纯模型的仿真、到半实物的仿真、到场地和道路测试这一正向开发流程。这一开发流程和方法价值何在呢?要对自动驾驶车辆进行充分的测试验证,需要多达142亿英里的路试,这显然与有限的产品开发时间和生命周期是相悖的。这带来一个经典的问题:究竟需要多少测试,才能证明自动驾驶产品是成熟可靠、可以上市的呢?
把这一问题细化,可以提出五个具体问题:
1.测试历程和工况场景几乎是无限的
2.严苛工况和全面工况在道路测试中可遇不可求
3.即使能遇到严苛工况,也不可重现,无法重复验证
4.在道路上,缺乏真值数据来对比检验系统性能
5.部分测试工况具有危险性和复杂性
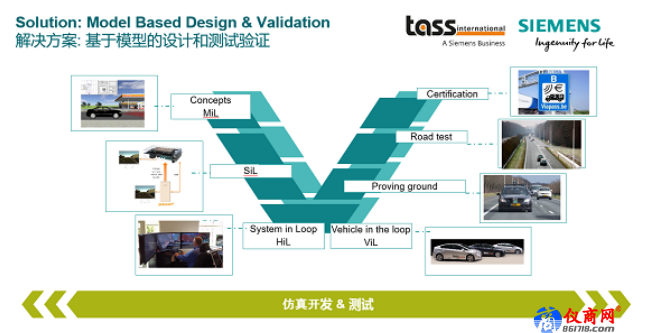
为了应对这些挑战,我们提出了基于模型的设计和测试验证方法。本文将通过一系列的实际工程案例,来具体阐发这一方法论。这一方法论的核心,是以PreScan为核心的仿真技术。基于这一仿真技术,可以进行MiL-模型在环,SiL软件在环,HiL硬件在环,ViL车辆在环,直到场地测试和道路测试,从而构成完整的开发测试流程。
自动驾驶系统可以划分为四个功能模块,第一是测试工况,第二是环境感知的传感器,第三是控制决策规划的算法,最后是底盘执行器。PreScan仿真技术,可以对这四个功能模块进行建模仿真,构成完整的自动驾驶系统的模型。

接下来为大家介绍几个案例,来说明我们的方法论。
第一个案例是为北欧某OEM做的测试项目。我们知道,测试工况的种类、数量、覆盖度对系统的测试至关重要,测试工况的来源有多种。本项目中,我们使用了德国GIDAS交通事故数据,PreScan可以自动的把GIDAS事故数据转换成测试场景模型。有了场景工况的模型,再结合环境感知、控制算法、底盘动力学的模型,就会构成非常完整的系统仿真方案。GIDAS数据库的场景非常多,所以我们提供了基于集群计算机服务器的计算方法,使得我们可以进行高效的大规模的工况计算。当然,今天PreScan也支持中国的交通事故数据库CIDAS,这都是非常有价值的测试工况来源之一。
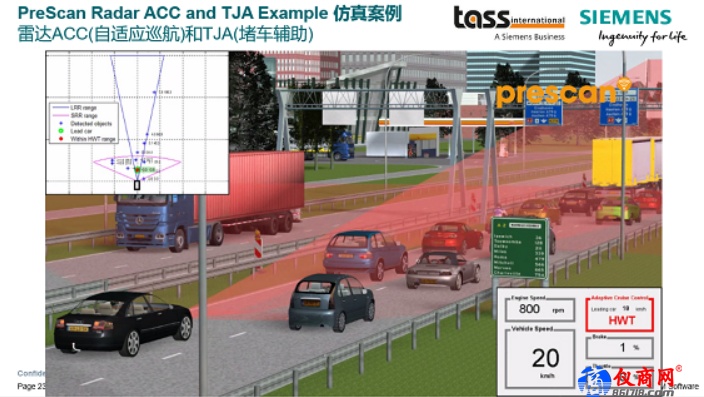
第二个案例是ACC的性能标定案例。ACC的测试,有一个典型工况,即所谓的Cut-In目标车突然变道到主车车道上的工况。构成这一工况有很多的元素,比如车速、切入的时机、切入之后目标车的状态等等,如果各个元素的多种取值做排列组合,会发现这个单一工况可以轻易地衍生出几十万种组合。
有了这么多的工况,怎么样进行ACC的性能分析呢?ACC系统有一个重要的性能参数就是加速度的变化率,即所谓的jerk,影响它的有很多参数,包括雷达传感器的检测延时、ACC控制算法包括PID参数的标定、执行机构对加减速的响应延迟和上升特性、底盘动力学的特性等,我们要想定量的分析决定优化的参数,靠路试的主观评价是远远不够的,必须通过模型和参数的分析来决定最优的参数组合。
当产品有了原型,就可以进行HiL硬件在环的测试,这里有一个我们给某日系主机厂和供应商提供的摄像头LKA系统HiL项目案例。我们知道,要充分测试LKA系统的性能,需要在大量的、不同车道状态组合的工况下进行测试。道路测试很难遍历不同的车道组合,比如不同转弯半径的车道,难以在真实道路上都找得到。这时候,毫无疑问,能够轻易定制测试工况的HiL的测试效率远超道路测试。
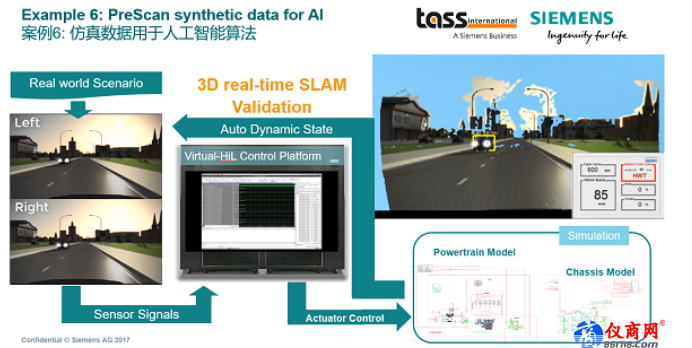
下一个案例,我想分享我们使用仿真产生的场景数据用于AI人工智能算法的优化迭代,PreScan场景工况测试能够基于Nvidia PX的人工智能算法,进行可行驶区域Free Space Detection,也可以用来测试3D SLAM算法。这其中,有两个重要的技术点:
第一个,当今的人工智能驾驶技术越来越倾向于使用感知传感器的原始数据进行数据融合,这也是PreScan环境感知传感器的开发方向,尽量地提供原始数据输出;
第二个,我们知道AI人工智能算法的训练结果质量与测试工况的数量和覆盖度相关,因此,为了弥补路采素材代表性不足的缺陷,可以使用仿真技术的路况可定制的优势,生成仿真数据,加入训练集中,可以提高算法训练结果的质量。
当我们产品可以上市装车的时候,车辆在环ViL就成为了一个手段。这是案例,是我们向上海某整车厂提供的基于毫米波雷达的ACC/AEB系统的ViL测试平台。这样的解决方案具有什么价值?以前,该主机厂主要是通过道路测试和主观评价来进行性能的验证,但这一手段具有一系列的缺陷。比如,测试工况没有办法去定制,定制之后很难精确的控制实现,实现之后也很难重现和重复测试,有时候,道路测试忙了一天,上百个测试工况下来,发现效果都不一定很好。而ViL车辆在环的方法顺利的克服了上述难点,大大提高了测试效率。当然,PreScan也可以支持动态的驾驶模拟仪。
除了仿真测试技术,TASS也有丰富的道路测试经验,我们是EuroNCAP组织授权的官方试验场,有丰富的AEB/LDA/ISA等系统的法规测试经验。在TASS荷兰,我们还运营着基于7公里高速公路的自动驾驶试验场,这是全球最早的自动驾驶道路试验场。
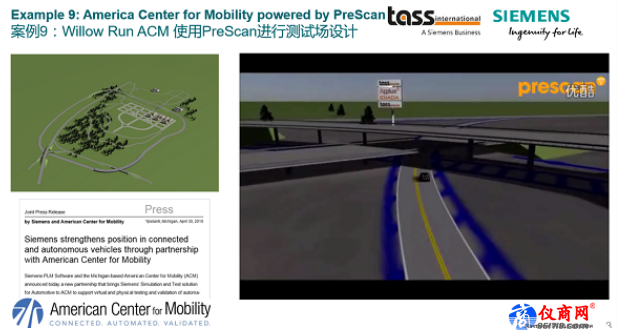
基于此,我们也能输出自动驾驶试验场的设计技术。比如,在美国密西根大学的Mcity,就曾经使用PreScan进行试验场的可视化设计和仿真测试应用。在ACM-America Center for Mobility,TASS向其提供了场地设计咨询服务,Siemens和TASS也是ACM的紧密合作伙伴。
今天通过一些实际的案例,阐述了基于模型和以PreScan仿真技术为核心的自动驾驶系统正向开发、测试流程。
虽然仿真技术作为一种工具,带来了很大的价值,但是也有很多的技术难点,我们可以举几个例子。
第一是场景的渲染能力,这是当前PreScan场景渲染质量的示意图例,下一步我们会进一步提升我们的渲染能力,不排除利用Unreal等游戏引擎进行场景渲染,提高场景渲染质量。

第二,我们计划逐步把测试工况里面的所有元素参数化,并将参数开放,可以用外部程序来控制,从而可以轻易地获得自动生成的、大量的、不同类型的测试工况。
第三,环境感知传感器的建模能力需要对传感器物理原理的大量先验知识和经验,这也是PreScan仿真技术一直在全球领先的重要技术之一。
以摄像头为例,我们可以仿真从光源、传播媒介、目标表面材质、光进入镜头、到达成像器件、甚至后续的AD转换等等成像的所有物理环节。最终的实际效果是非常好的。
以毫米波雷达为例,我们知道毫米波雷达的感知特性,首先是感知精度和分辨率的问题,然后是目标的反射回的能量的问题,随后还有一系列的常见缺陷特性:漏检测、误检测、目标分列、过大的延迟等问题。我们还计划发布对雷达天线发射和接收端的性能模型。
以激光雷达为例,PreScan可以建立其感知模型并输出目标级别、或点云级别的结果。同时,还提供单独的点云传感器模型。

本文所分享的技术和案例充分表明,基于模型的自动驾驶系统性能开发的正向流程,必须经历从纯模型仿真、半实物仿真、受控场地测试和道路测试这一流程,才是符合工程实际的、效用合理的过程,这构成了今天的主题:基于模型的自动驾驶性能测试和开发流程。
自动驾驶的技术浪潮汹涌,希望西门子-TASS通过完整的仿真开发工具和解决方案,为自动驾驶产品开发提供良好的支撑,大家携起手来,共同成为自动驾驶技术浪潮中的一分子。