AGV在智能工厂、智能仓储上得到了广泛应用,技术上获得了迅猛发展,衍生出了多种导航方式,不同的导航方式有何特点?谁会成为未来主流的导航方式呢?
AGV简介
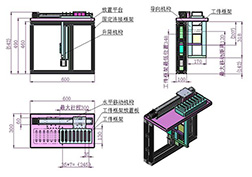
AGV即自动导向小车(Automated Guided Vehicle),因具有良好的柔性和较高的可靠性,能够减少工厂对劳动力的需求,提高产品设备在运输中的安全性且安装容易,维护方便,已经广泛的应用于自动化仓储系统、智能工厂、智能生产等领域。

图 1 AGV工作场景
在应用环境中,往往由多台AGV组成自动导向小车系统,该系统通过WIFI或其他传输链路,控制AGV动作。主要控制功能包括:地图管理、路径导航、路径规划、AGV导航控制、任务分配等
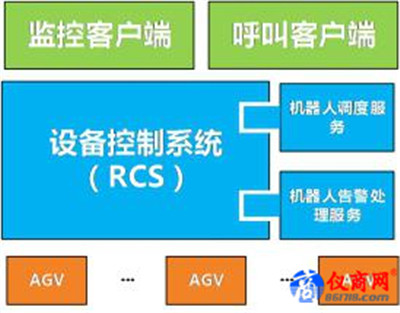
图 2 AGV控制系统软件结构
AGV导航方式
所谓AGV导航方式是指决定其运行方向和路径的方式,它不同于前面所说的一般通信。常用的导航方式分两大类:
车外预定路径方式:是指在行驶的路径上设置导航用的信息媒介物,AGV通过检测出它的信息而得到导向的导航方式,如视觉二维码、磁带导航、电磁导航等;
非预定路径(自由路径)导航方式:是指在AGV上储存着布局上的尺寸坐标,通过识别车体当前方位来自主地决定行驶路径的导航方式,如激光导航、SLAM方式(Simultaneous Localization And Mapping)。什么是SLAM?一张图带你认识它,机器人之思考既是SLAM需要解决的问题。

图 3 SLAM需要解决的问题
AGV根据不同的应用场景已衍生出了多种导航方式,每种导航方式也许都存在相应的优劣势,但均能找到自己的“用武之地”。
AGV导航方式分析
早期的AGV多是用磁带或电磁导航,这两种方案原理简单、技术成熟,成本低,但是改变或扩展路径及后期的维护比较麻烦,并且AGV只能按固定路线行走,无法实现智能避让,或通过控制系统实时更改任务。
目前AGV主流的导航方式是二维码+惯导,这种方式使用相对灵活,铺设或改变路径也比较容易,但路径需要定期维护,如果场地复杂则要频繁的更换二维码,另外对陀螺仪的精度及使用寿命要求严格。