在G-type力矩控制作用下,系统振动达到最低,从而保证系统在低速下平稳、正常运转,扩大了系统实际运行的低频范围。通过下图可以看出,G-type力矩控制可以在低于30[rps]时大幅降低系统振动。

各种力矩控制作用下,系统振动振幅在各个转速下的比较图。
•M-type力矩控制
在M-type力矩控制作用下,变频器输出恒定的力矩,电动机相电流波形峰值下降,降低了谐波与功率损耗,降低了系统噪音。下图为M-type力矩控制时的电动机相电流波形与没有力矩控制是的电动机相电流的比较。

没有力矩控制时的相电流波形

M-Type力矩控制时的相电流波形
独创的过调制技术
与A-PAM技术相配合,提高直流母线电压的利用率,过调制会带来谐波失真。为了克服这一缺陷,RAMDA算法中限制谐波失真度低于10%,通过精准的计算调制度与输出电压和直流母线电压比值之间的关系,RAMDA算法开发了独创的过调制算法。如下图所示如果不应用过调制技术,最大调制度只能到1.15。
线性调制

在保证谐波失真度低于10%的情况下,应用RAMDA算法的过调制技术,调制度最大可以达到2。
过调制

弱磁控制功能
尽量避免输出电压饱和,保证在有限的直流母线电压的情况下,输出符合要求的力矩。
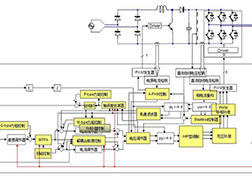
随着转速的不断升高,绕组中的感应电压幅值越来越高。 当直流母线电压一定时,绕组端电压的幅值有限。 这样,如果仍然根据MTPA等算法发送电压指令,绕组电压甚至低于感应电动势的电压, 这就会导致绕组中的电流不足,逆变器无法输送足够的功率给电动机。 为了解决这一个问题,有意在d-轴上增加负的电流,让绕组电压的相位超前感应电动势, 以保持输出到电动机的功率。这就是弱磁控制。 对于IPM电机来说,我们定义三种弱磁的“境界” 1)充分利用永磁扭矩和磁阻扭矩的MTPA算法。 2)直流母线电压一定条件下,保持输出扭矩恒定的“浅弱磁” 3)直流母线电压一定条件下,保持高转速和恒定输出功率的“深度弱磁”。

弱磁控制基本原理