图 7 Simulink 环境下安全跟车距离模型
将安全跟车距离模型在 Simulink 环境下进行搭建,并通过快速原型设备进行实车测试。测试过程中实时获取目标车辆的相对距离、相对速度以及自车的速度,根据式(6)实时计算安全跟车距离。Simulink 环境下的模型如图 7 所示。
其中,停止距离 stopGap 为 7 m,驾驶员反应时间 T_r 为 2 s,加速度常数 a 为 1.5 m/s^2。
4. 基于驾驶特性的 ACC 系统实车测试
4.1 实车测试环境

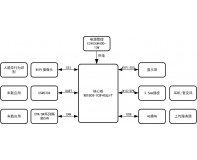
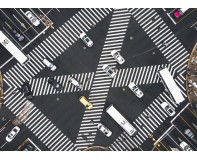
图 8 ACC 开发平台与测试场景
将安全距离计算方法集成到 ACC 模型中,并进行实车测试,测试平台和测试环境如图 8 所示。通过快速原型方式将算法下载到 AutoBox 中,接入毫米波雷达获取目标距离、方位角、相对速度等障碍物信息,接入整车网络获取自车车速、转向盘转角等车辆状态信息。通过制动减速度、发动机扭矩实现自车车速控制,从而保持安全距离。
4.2 实车测试数据分析

图 9 实车测试结果
图 9 为基于图 7 的安全跟车距离进行自适应巡航的实车测试数据。从图中可以看出,所提出的计算安全跟车距离的模型能够为自适应巡航系统提供有效的控制目标,并与车速控制系统形成合理的闭环,及时响应速度与相对速度的变化,以此为依据进行后续控制能够将自车与目标车之间的距离保持在合理范围内。
5. 结论
分析跟车过程中的驾驶行为,结合前车运动、自车运动和驾驶员反应时间计算实际跟车过程中的理论安全距离,通过与实际跟车测试数据对比,发现模型能够较好地拟合跟车过程,可用于自动驾驶或者自适应巡航系统的跟车距离决策,并且通过特征参数调整获取不同驾驶/乘坐习惯,这使自适应巡航系统更加符合驾驶员的跟车行为,带来更好的舒适性。