车辆网络技术、控制技术的广泛应用和车辆控制自由度的不断提高,为车辆智能化技术应用提供了坚实的基础。多种具备车载应用条件的传感器逐渐普及,为车辆智能化技术应用提供了丰富的信息。在感知与执行条件具备的前提下,开展车辆决策与控制技术研究,使车辆智能化技术在车辆系统中实现,突破传统的结构设计和面临的技术瓶颈,通过智能化技术提高车辆安全、节能、舒适等综合性能,是目前汽车技术领域关键的研究和应用方向。
自适应巡航系统(Adaptive Cruise Control,ACC)在定速巡航系统(Cruise Control,CC)的基础上,进一步考虑安全性与舒适性,能够缓解驾驶疲劳,具备广阔的发展空间。如何合理决策安全跟车距离与安全跟车速度是 ACC 算法开发的核心。
从实际驾驶特性出发,提出一种有效的计算安全跟车距离的算法,基于此开发全速自适应巡航系统,满足跟起、跟停、跟车、巡航等各种自适应巡航工况,满足实际驾驶情况的稳定性和舒适性。
1.ACC 系统结构与原理说明

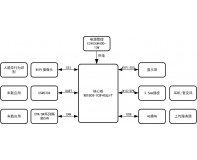
图 1 ACC 系统结构
注: VCU 为 Vehicle Control Unit,整车控制器; ESC 为 Electronic Stability Controller , 车 身 电 子 稳 定 控 制 系 统 ; BMS 为 Battery Management System,电池管理系统。
ACC系统结构如图 1 所示,是一种智能化自动控制系统,是定速巡航控制系统的升级。其中,最大区别在于 ACC 以雷达、相机为传感器,持续扫描车辆前方道路,探测前方障碍物的距离、速度,同时结合驾驶员意图和自车运动状态,决策安全跟车距离和安全跟车速度。当与前车之间距离过小时,ACC 控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,使发动机的输出功率下降,使车辆与前方车辆始终保持安全距离。
2. 基于驾驶员跟车特性的自适应巡航算法开发
2.1 ACC 系统中安全跟车距离计算

图 2 跟随目标信息检测
ACC 系统通过获得自车运动状态(车速、加速度、转向盘转角)、驾驶员意图(转向盘转角、油门踏板开度、制动踏板开度)等车辆内部状态信息,进行车辆运动估计和驾驶员意图估计,然后指导雷达、相机等传感器进行信号处理和信息融合,提高识别的准确率和算法的运算效率,确定有效的跟随目标 。确定有效目标后,获得跟随目标的距离、相对速度(相对自车)等信息,如图 2 所示。
获取目标车相对自车的距离与相对速度后,实时判断当前的跟车距离是否安全,当判定当前的跟车距离小于安全跟车距离时,执行减速控制;反之,当判定当前的跟车距离大于安全跟车距离并且当前车速未达到设置的巡航车速时,执行加速控制。可见,合理决策安全跟车距离在 ACC 系统算法中非常关键。
2.2 基于驾驶员实际跟车特性的安全跟车距离
目前,ACC 算法中多数是利用跟车时间间隙计算安全跟车距离,即:
式中,v 为自车的速度;T 为跟车时间间隙。

图 3 驾驶员跟车数据
图 3 为驾驶员跟车过程中记录的一段数据,从图中可以看出,在实际驾驶过程中,跟车距离不仅与自车车速相关,而且与目标车辆的相对速度趋势关系密切,所以,仅依据自车的速度决策跟车距离是不完善的,需要考虑驾驶员的跟车特性 [4],提出一种新的充分考虑安全因素的决策安全跟车距离的算法。
根据加速度-位移公式: