打开示波器接人秒脉冲信号的通道,寻找各自的秒脉冲信号利用示波器的光标测量功能测量出两路脉冲信号的差值。测量示意图如图4所示。

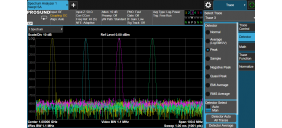
图4两路秒脉冲信号的差值测量
Fig.4 Difference measurement of two second pulse signals
如果通过目测,确定两者时间差<1s,则示波器测量出的数据为两者的时间差;如果两者时间差>1s则目测得出相差的整秒数加上示波器测量的数据为两者的时间差。
在相同条件下,重复测量时间差10次,测量结果如表1所示。
表1 10次独立测量数据
Tab.1 10 independent measurements

由贝塞尔公式可得:

使用示波器光标测量时间差引人的最大误差不超过士1%,为均匀分布,则标准不确定度:

示波器读数分辨力引入的标准不确定度为:

溯源系统测量时间误差不超过10ns引人的标准不确定度可忽略不计则合成标准不确定度为:

因此使用此溯源方法的扩展不确定度约为0.09x2=0.18ms(k-2)。
综上所述此溯源方法,即使用示波器测量秒脉冲信号得出测试仪与溯源系统的时间差可提供毫秒级别的溯源准确度。
结论
本文基于新能源汽车充电桩测试仪的时间校准功能提出了该类仪器的时间溯源方法并且分析了其测量不确定度。
鉴于充电桩测试仪的时间校准功能还不算太完善其开放的用于时间校准或者配合溯源的接口配备不全导致溯源方法受限。例如目测对时这种方法是存在较大误差的,因为测试仪使用的是液晶显示屏刷新率较低其内部时钟发出的秒脉冲信号与实际在显示屏上的时间变化存在较大的延迟。更准确的方法是测试仪与溯源系统的秒脉冲信号的对比。另外示波器的时间测量误差较大,准确度只能达到毫秒级别如果希望达到微秒甚至是纳秒级别的测量准确度就需要使用其他的时间测量仪器。针对上述问题下面提出几点设想的改进方法。
1)增加时间显示装置的显示位数。增加充电桩和溯源系统的时间显示位数例如增加0.1秒的显示位数就能加快<1s的时间差的测量速度;
2)规范充电桩测试仪的输入输出接口。为得到更准确的时间差测试仪除了现有的秒脉冲输出接口外还应配备频率信号输出、外参考频率输人、外参考秒脉冲输入等接口确保数字时钟能实现GNSS授时同步或外部参考同步;
3)选择更高准确度的时间测量仪器。使用时间间隔测量仪SR620或频率计53181A等可获得比示波器更准确的时间差数据精度可达到ns级别。