FLIR热像海事陀螺稳像系统;FLIR热像视频跟踪系统;带有雷达与视频联动功能;搭配成套船用计算机、海事信息处理软件平台,且本系统既能实现自动控制,也能实现手动控制;FLIR红外热像制冷系列观察10KM ,红外热像非制冷系列观察3KM;FLIR的产品,既能前端控制,也能后端控制,还可设置控制优先级别;既能纵向传递信息,也能实现网络信息共享;实现对监控区域全天候侦察监视,及时可靠,形象直观地获取海域、低空异常情况等要求。
高端的光电系统与雷达联动实现了雷达目标信号与光学图像相联动的远程监控,将大大提高目标搜索和跟踪的速度和精度,提高了对海侦察情报效益。由于该系统还可远程传输和控制,因此可广泛的应用于海上搜救,环保监测等环境极其恶劣的重要场所。

海军实验性态势感知系统(SAWS),包括两个放置在航空母舰舰头和舰尾的光电红外传感器,能提供360°监视能力
军用光电红外传感器技术的发展趋势是传感器融合,多种类型的传感器融合及建立相对数据提供产品的软件是长远发展的关键。它和传感器一样成本高昂,解析更多数据需要缩减原始数据与实用信息之间的时间。
方案需求分析
在技术上无人艇相对于无人机的技术难度更大:
海况比空中更复杂。空中主要考虑空气动力学,而无人船面对的则是水,流体不仅要面对推力,更要面对各种涌动。因此,流体的建模非常复杂,而且现在一直做的都不是特别好,这是目前行业性的难题。
海上的障碍物更多。无人机空中飞行的障碍物是相对较少的,而水面行驶则要面临包括岛礁以及其他船只等各种障碍物。
无人机一般风过大时便不能起降了,但无人船则要求承受更大的风浪,无人船除了生命保障系统外,其他系统跟有人船的要求都是一样的。这些都意味着无人船的避障相比无人机会难更多。

“船在海上的姿态会有 3 个自由度的运动,俯仰、偏航和滚动。所以,控制系统是无人船的核心也是难点。”张海波表示。
据了解,控制的基本过程主要有三步,首先是输入,通过各种传感器找到无人船的状态,并比较这个状态跟理论状态有没有偏差,然后通过设定的控制规律修正这个偏差,之后再测量输入,循环往复。张海波介绍其中便涉及到 3 个技术难点:
问题一,为了更全面地了解无人船周边的情况,可能会用到各种传感器,包括雷达、摄像头、声呐等等,但问题就在于如何融合这些传感器所采集的数据。张海波表示,在实验室环境中这个问题已经基本解决了,但到了产品化方面还是有些困难。
问题二,对无人船而言制导也是一个难点,知道了无人船的状态,但怎么修正?其实即使是对于稍微简单的空气,由于温度等因素,人类也是很难做出一个标准方程的,因此需要进行大量的风洞试验,而流体则更复杂,需要做类似风洞试验的实地测试。而且,即使是通过了这个试验,其与真实海况也还是不一样的。
问题三,如何执行制导方案?由于惯性,船制动和倒车的滞后是很长的,如何操作船上的舵之类的设备也是一个问题。
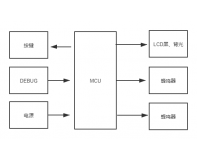
方案原理分析

光电系统原理