iDAR应用仿生技术来扩展人类视觉皮层的人工感知能力。人眼通常只集中看一个区域,而iDAR可以同时(以多种方式)集中在多个区域,同时还可以进行背景扫描以确保不会遗漏任何新进入物体。我们将此功能描述为感兴趣区域(ROI)。此外,由于人类完全依赖于来自太阳、月亮或人造照明发出的光,因此人类的“Foveation视觉模型”是“只能接收”的,即是被动的。相比之下,iDAR集中在发射端(激光选择“绘画”的区域)和接收端(处理被选择的关注位置/时间)两个方面。
图2是一个示例。图2显示了两种系统,即系统A和系统B。这两种系统在同一场景中具有相似数量的拍摄次数(左)。系统A代表传统激光雷达的典型扫描模式,固定的扫描模式会产生固定的帧率,而没有ROI的概念。系统B显示了调整后的灵敏扫描模式。系统B中的拍摄次数在正方形内的ROI(小方框)之内和周围更加密集。此外,背景扫描继续搜索以确保不会遗漏任何新目标,同时对固定区域增加额外的分辨率以帮助采集。从本质上讲,这是利用智能来优化功率和拍摄次数。
查看系统A和B相关图(右),我们发现系统B(灵敏扫描模式)可以在比系统A(固定扫描模式)短得多的时间间隔内重新访问ROI。系统B不仅可以完成一次ROI重访间隔,还能在单帧内实现多个ROI。而系统A无法重新访问。iDAR实现传统激光雷达无法完成的事情:实现动态感知,使系统能够以前所未有的速度专注于特定ROI并收集更全面的数据。
相比,iDAR(B)的感兴趣区域(ROI)和Foveation视觉模型展示。")
图2:与传统扫描模式(A)相比,iDAR(B)的感兴趣区域(ROI)和Foveation视觉模型展示。
在“搜索、采集和采取行动”架构中,瞬时分辨率使iDAR系统可以搜索整个场景并获取多个目标,并捕获有关它们的更多信息。iDAR还允许在一个场景中创建多个同时的ROI,从而使系统能够关注并收集特定目标更全面的数据,从而更完整地询问并更有效地跟踪目标。
实际用例:目标询问
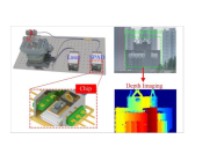
识别出感兴趣目标后,iDAR可以实现Foveation视觉模型,扫描、收集更多有用信息并采取额外的分类属性。例如,假设车辆在行进路径中遇到了一位正在穿过人行横道的行人。由于iDAR可以动态改变ROI内的时间和空间采样密度(因此我们称之为“瞬时分辨率”),该系统可以更多地关注到人行横道,而较少地关注无关信息,如路边停放的车辆。ROI使iDAR可以快速、有效和准确地识别有关人行横道的关键信息,例如速度和方向。iDAR系统向域控制器提供最有用、最可执行的数据,以确定最及时的行动方案。
有三种利用瞬时分辨率来实现的用例:
固定ROI:如今,被动系统只能分配更多的水平扫描线,这是一种非常简单的Foveation视觉技术,受其固定分辨率限制。具有瞬时分辨率的第二代智能激光雷达(如iDAR),可帮助整车厂或Tier 1厂商利用先进仿真程序来测试数百个(甚至数千个)拍摄模式(无论速度、功率和其他限制条件如何变化)以识别将固定ROI与更高瞬时分辨率集成在一起的最佳模式,获得其所需的结果。
例如,固定ROI可用于优化不同倾斜度前窗玻璃后面的拍摄模式。此外,固定ROI还可以用于相对复杂的城市环境,威胁更可能来自路边,例如车门打开,行人和其它交通工具横穿马路或车辆的前进路径。增加覆盖道路两侧和车辆前方路面固定区域的分辨率来定义ROI(请参考图3B)。这样可以为ROI提供出色的垂直分辨率和水平分辨率。模式一旦获得批准,就可以固定以确保功能安全。
触发式ROI:触发式ROI需要软件可定义的系统,该系统可进行编程以接受触发。感知软件团队可以确定,当满足某些条件时,将在现有扫描模式中生成ROI。例如,地图或导航系统可能会发出信号通知您正在接近十字路口,在场景的关键区域上产生目标ROI更多细节(请参考图3C)。
动态ROI:动态ROI需要最高智能水平,并利用战斗机自动瞄准系统(ATS)的相同技术和方法,随时间推移连续询问关注目标。当这些目标移近或离开时,ROI的大小和密度会发生变化。例如,可以探测到场景中的行人、自行车骑行者、车辆或其它物体,并自动应用动态ROI来跟踪其运动(请参考图3D)。

图3:图A展示了车辆接近十字路口时的场景。图B展示了固定ROI覆盖道路两侧和紧邻车辆前方区域的情况。图C展示了触发式ROI:导航系统在车辆接近十字路口时触发特定的ROI。图D展示了动态ROI:当多个目标在场景中移动时,它们会被探测到并被跟踪。
传统指标三:目标探测距离
扩展:目标分类距离(object classification range),拥有足够的数据来以实现对目标分类的距离