随着自动驾驶汽车市场的成熟,传感器和感知工程师评估系统效率、可靠性和性能等工作变得越来越复杂。许多行业领导者已经认识到,用于激光雷达(LiDAR)数据收集的常规指标,例如帧率(frame rate)、全帧分辨率(full frame resolution)和探测距离(detection range)已不再能充分衡量激光雷达解决自动驾驶实际用例的有效性。
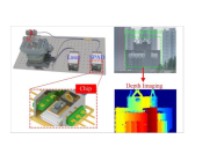
第一代激光雷达被动地搜索场景并使用背景图案来探测物体,而背景图案在时间(无法通过快速重新访问进行增强)和空间(无法在诸如路面或行人之类的高度感兴趣区域额外增加分辨率)两个维度都是固定的。新型先进固态激光雷达可实现智能信息捕获,从而将其功能从“被动搜索”或目标探测扩展到“主动搜索”,在许多情况下,还可以实时获取目标的分类属性。
由于早期的激光雷达使用固定光栅扫描,因此行业采用的是非常简单的性能指标,无法表达出自动驾驶对所需传感器的细微要求差别。因此,以AEye在内的许多激光雷达行业领导厂商正提议采用三项新指标来扩展对激光雷达性能的评估。具体而言:对“帧率(Rate)”指标进行扩展,以包括“目标重访速度”;对“分辨率(Resolution)”指标进行扩展,以获得“瞬时分辨率”;对“探测距离(Range)”指标进行扩展,以反映更重要的“目标分类距离”。
我们建议将这些新指标与摄像头、雷达和被动激光雷达性能的现有指标结合使用。这些扩展的指标可衡量传感器智能增强感知能力,并对传感器系统在现实环境中改善自动驾驶汽车安全性和性能进行更全面的评估。
自动驾驶行业利用了经先进机器视觉研究验证后的架构,并将其应用于特定激光雷达产品。事实证明,相比于目标识别,“搜索、采集(或分类)和采取行动”的架构具有通用性和指导性。
搜索是探测到所有目标而不会丢失任何目标的能力。
采集被定义为能够进行搜索探测并增强对目标属性的理解,以加速分类并确定意图的能力(可通过对目标类型进行分类或计算来实现)。
采取行动指由车辆感知系统或域控制器经过训练或建议对传感器定义的响应。响应大致可分为四类:(1)继续对新目标进行扫描,不需要增强信息;(2)对目标继续扫描并进一步询问,收集有关目标属性的更多信息以进行分类;(3)对目标继续扫描并跟踪分类为非威胁性目标;(4)对目标继续扫描并命令控制系统采取规避措施。
此架构的最终目标就是车辆完全安全运行所要求的性能指标和系统有效性。但是,由于目前大多数激光雷达系统都是被动的,只能进行基本搜索。因此,用于评估这些系统性能的常规指标与基本的目标探测功能有关:帧率(Rate)、分辨率(Resolution)和探测距离(Range)。如果以安全性为最终目标,则“搜索”需要更加智能,“采集(或分类)”操作必须更快速准确地进行,以便传感器或车辆确定如何立即“采取行动”。
汽车激光雷达系统的制造商经常被问及产品帧率,以及技术是否有能力在一定距离内(通常为230米)探测到反射率为10%的物体。我们认为这些是必须的基本指标,但无法证明其捕捉关键细节(例如目标尺寸,被探测和识别所需的速度,或收集信息的成本),因而无法满足要求。我们认为,在评估汽车激光雷达系统时,采用更全面的方法将对该行业产生积极影响。我们必须从整体审视与感知系统相关的指标,而不是将其作为单一的传感器,然后问自己:“哪些信息将使感知系统做出更好、更快的决策?”
传统指标一:10Hz~20Hz的帧率
扩展:目标重访速度(Object Revisit Rate),对某一点或多点两次拍摄的时间差
仅定义单点探测距离是不够的,因为单个询问点(单次拍摄)很难提供足够的置信度——仅具有参考价值。因此,被动激光雷达系统需要对同一位置进行多次询问/探测,或者在同一目标上进行多次询问/探测以验证目标或场景。在探测系统中,探测目标所需的时间取决于许多变量,例如距离、询问模式、分辨率、反射率、物体的形状和扫描速率。
传统度量标准缺少的一个关键因素是对时间更精细的定义。因此,我们建议将目标重新访问速度作为汽车激光雷达的一项新指标,诸如AEye推出的高灵敏度激光雷达iDAR能够重新访问同一帧内的目标。对目标的第一次测量与第二次测量之间的时间差非常关键,因为较短的目标重访时间可以缩短关联场景中多个运动目标先进算法的处理时间。当样本的时间差过长时,关联/相关多个运动目标的最佳算法可能会出现混乱。冗长的合并处理时间或延迟是该行业面临的主要问题。