图3、4和5显示了仿真ECU的输出。基于保密的理由,所采用的仿真数据非常近似于用典型ECU监视到的信号。通道1和通道2显示的是控制输出驱动致动器信号的仿真PWM信号。通道3捕获的是仿真的致动器信号,通道4显示的是CAN分离电压。
图3显示的是在模板测试功能关闭的情况下观察到的每个信号波形。示波器选用的是通道2上的边沿触发模式,所有4个波形都是被同步捕获的。

图3:仿真ECU的输出信号包括通道1和通道2上的PWM信号、通道3上的致动器驱动输出信号和通道4上的
图4显示了模板测试功能。模板形状可以用来验证信号的高电平、低电平、频率、占空比和其它参数是否在测试计划描述的容差极限之内。模板厚度形成了定义好的标称值四周的规定容差带,用它就可以验证每个捕获的波形与定义好的标称值的偏差是否超过规定的百分比。在这个例子中,所有波形都满足全部的指定测试标准。注意,设置为边沿触发的示波器是使用预先定义的模板标准连续监视偏差的。示波器由通道2上产生的边沿触发,并且示波器被配置为当每种偏差发生时进行识别和记录。

图4:仿真ECU的输出信号表明,通道1和通道2上的PWM信号、通道3上的致动器驱动输出信号和通道4上
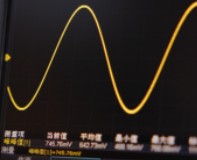
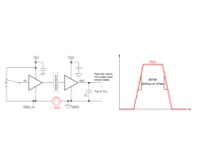
在图5中,仿真ECU展示了在受到1kHz调幅电场干扰时超出容差的响应。PWM信号的幅度降低了,它们的占空比变大了。另外,调制频率在高状态期间叠加到了信号上。驱动器输出波形反映了来自干扰的间接效应,因为它只响应PWM输入信号。与其它三个信号不同,CAN分离信号不受电磁干扰的影响,持续产生符合的结果。因此这类模板测试允许实时快速地测试多个标准。

图5:当受到电磁干扰时,仿真ECU的PWM信号和致动器驱动输出信号都超过了容差模板测试标准,示波器提
除了波形模板测试外,通过/失败极限也会应用于参数化数据,用于确保数值测量结果同样符合规定的极限值。注意图5中的屏幕图形,示波器指示发生了三处偏差,在屏幕上的测试标准下方分别用红色的“Fail”消息表示了出来。在模板故障或参数极限故障事件中,示波器还能自动执行一些动作,比如保存波形数据用于直接比较和归档,保存屏蔽图形用于归档和评估,生成一个脉冲并从示波器输出来用于辅助测试自动化,并在发生偏差时产生一个告警音用来提醒测试人员。
虽然示波器完全能够执行快速的参数化测量,满足电磁兼容抗干扰测试中的偏差检测要求,但它们经常被忽视,主要原因是人们缺少应有的意识,并缺少足够的示波器通道数量。使用示波器阵列是在抗干扰测试中判断ECU信号和致动器输出信号质量可能最有效和最具成本效益的方法,由于使用通过/失败模板和参数极限测试的大多数功能已经实现,所以与实现定制数据采集系统完成同样严格的电磁兼容偏差检测测试所需的高的软件开发时间成本相比,可以显著节省设计工程师在功能测试上花费的成本和时间。