成功研制爬行式焊接机器人,价值千亿居于世界领先水平
二十世纪七十年代末,潘际銮致力于研究电弧传感器,首次建立电弧传感器的动、静态物理数学模型,并成功研制独具特色的电弧传感器及自动跟踪系统。
二十世纪八十年代,潘际銮研究成功“QH-ARC”焊接电弧控制法,首次提出用电源的多折线外特性,陡升外特性及扫描外特性控制电弧的概念,为焊接电弧的控制及焊接自动化开辟了新路径。
科技创新硕果累累的潘际銮,并未停下在科技创新之路上下求索的脚步。他的目光瞄准了大型结构件焊接自动化的科技前沿,下决心攻克大型结构件焊接自动化这一世界级难题,他果断决定研究爬行式焊接机器人。
潘际銮设想中的爬行式焊接机器人,是一种能在不断运动中自动调整、自动焊接的超强机器人。其具备三大特色:一是无轨导,可不用铺设轨道;二是全方位,平焊、立焊、仰焊,无所不能;三是爬行式,能爬行运动。潘际銮这一独具匠心的创新构想甚为超前,因为在当时,世界上压根就不存在这种功能强大的焊接机器人。
历经长达二十载的潜心研究,潘际銮率团队成功研制无轨导全方位爬行式焊接机器人,顺利实现了三大突破。
第一大突破是能让机器人爬上去且在不掉下来的前提下可运动。潘际銮团队先后共研制了电磁式、履带永磁式、轮式、轮履结合式四代焊接机器人,最终采用了轮履式与悬浮磁吸附相结合的结构,实现了低自重、高负载的三维曲面吸附与爬行能力。
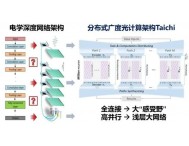
第二大突破是研发成功机器人控制系统。机器人主要由爬行机本体、电气控制柜、激光焊缝跟踪系统与焊接负载组成,为使各系统之间协调工作,潘际銮团队研发了多传感器的信息融合控制技术,搭建了中央控制器,无需编程便可实现自动化操作。
第三大突破是焊缝自主识别并确保焊接质量。通过机器人搭载的激光跟踪传感器抓取焊缝特征,结合姿态传感器的数据,中央控制器实时计算运动偏差,轮履式机构实时调整位置,实现自主识别焊缝、自主对中焊缝,并实现自主焊接。通过对焊接材料的研究,焊缝能够成型,焊接质量得到可靠保障。
2003年11月,国内焊接行业全部院士和数名顶尖级专家对项目进行了鉴定,一致认为“其成果的技术集成与创新处于国际领先水平”。
2006年,在北京举行的焊接与切割展览会上,该款机器人首次露面便成为全场备受瞩目的闪亮焦点。同行专家评价无轨导全方位爬行式焊接机器人填补了国内外该项技术的空白,系全球焊接领域中首创,属于世界领先、原始创新的科研成果,成为解决大型结构件在工地实现自动化焊接的超强利器。
潘际銮团队该项爬行式焊接机器人科研成果,可用于火箭、航母、巨轮、核电、石化等大型结构件,价值上千亿,可让火箭“天衣无缝”,能使核电站“密不透风” ……无论是社会效益还是经济效益,均堪称蔚为可观。