图2. 组合单轴传感器输出。
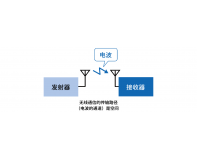
MEMS IMU频率响应分析
围绕新的MEMS IMU开发稳定系统时,在系统设计早期阶段了解频率响应是非常重要的,因为IMU的频率响应将对控制器设计产生直接影响,可以帮助识别潜在稳定性问题—特别是在考虑到新一代设计的高带宽解决方案时。这些信息对于预测陀螺仪的振动响应也非常有用。
评估IMU带宽的一种策略是确定哪些信息在产品文档中提供,分析此类信息对系统的惯性运动响应的影响,并稳定系统的响应。此类分析以及它涉及的所有校正操作将成为初始测试的基础。
率响应在IMU和陀螺仪的规格表中表示为"带宽"。作为一个性能参数,它表示某个频率,输出信号幅度在该频率下降低到传感器遇到的实际运动幅度的大约70% (–3 dB)。某些情况下,带宽可也定义为输出响应落后于实际运动90度时的频率(对于双极系统)。这两个指标可以直接影响控制环路的一个重要稳定准则:单位增益、相位裕量—环路响应的实际相位角度和–180°之间的差值,环路增益为1。了解反馈传感器的频率响应,是优化稳定性保证和系统响应之间的平衡的关键因素。除了管理稳定性标准之外,频率响应还会对振动抑制和制定采样策略产生直接影响,通过这些策略可以测量惯性平台上的所有关键瞬态信息。
要分析系统中的频率响应,首先要从一个高层次"黑盒子"视图开始,它描述了系统在整个目标频率范围内对输入的响应。在电子电路中,输入和输出是从一般意义上定义的,例如信号电平(伏特),分析通常包括开发传递函数,使用s域表示和电路-电平关系,例如基尔霍夫的电压和电流定律。对于惯性MEMS系统,输入是IMU遇到的惯性运动,输出通常以数字码表示。s域分析技术固然有很大作用,但要为这种类型的系统开发完整的传递函数,通常还需要采用其他技术,并且考虑到更多问题。
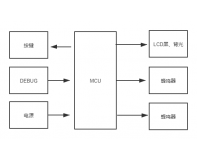
开始分析过程时,首先要了解与传感器信号链相关的所有组件。图3提供了典型函数的整体示意图。信号链从核心传感器元件开始,它将惯性运动转化为代表性的电信号。如果带宽在传感器元件中未受限制,则通常受ADC模块前的信号调理电路中的滤波器限制。信号数字化后,处理器通常应用纠错(校准)公式和数字滤波。第二级的数字滤波器会减小反馈系统在控制程序中使用的带宽和采样速率。所有这些级都可能影响传感器信号的增益和相位,与频率相关。图3提供了一个示例,IMU在混合信号处理系统中具有多个滤波器。该系统可作为一些实用分析技术的示例。