图 4 视觉二维码导航
随着SLAM算法的发展,SLAM成为了许多AGV厂家优先选择的先进导航方式,SLAM方式无需其他定位设施,形式路径灵活多变,能够适应多种现场环境。相信随着算法的成熟和硬件成本的压缩,SLAM无疑会成为未来AGV主流的导航方式。
SLAM大概分为激光SLAM(2D或3D)和视觉SLAM两大类。
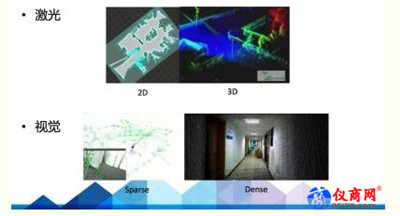
图 5 SLAM分类
视觉SLAM目前尚处于进一步研发和应用场景拓展阶段。视觉SLAM因为信息量大,适用范围广等优点受到了广泛关注,但是算法对处理器的要求较高,一般需要准桌面级的CPU甚至GPU,但是AGV用的多是嵌入式处理器,所以短时间很难在小型的AGV设备上大规模应用。
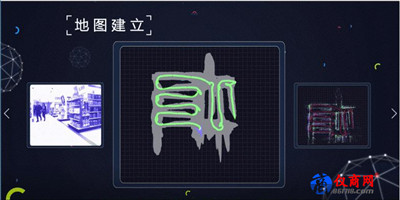
图 6 视觉SLAM导航
激光SLAM比视觉SLAM起步早,理论和技术都相对成熟,稳定性可靠性也得到了验证,并且对于处理器的性能需求大大低于视觉SLAM,比如主流的激光SLAM可以在普通的ARM CPU上实时运行,目前有的AGV厂家已经推出了基于激光SLAM导航的产品。无疑在一段时间内激光SLAM还是主流的SLAM方案。
图 7 激光SLAM导航
ZLG致远电子推出的M6708核心板,搭载freescale l.MX6系列双核/四核Cortex-A9处理器,1G主频,支持硬浮点运算,能够处理多任务执行,外接激光雷达测距传感器,配合SLAM算法,可智能识别外部环境,实现精准快速建立环境地图,规划全局路径。

图 8 M6708核心板接口资源
另外针对AGV行业ZLG致远电子还提供完整的无线联网方案和电源解决方案,有想要了解详细的AVG小车系统解决方案,欢迎一起来交流探讨。

图 9 AGV无线联网方案