机载光源使Flash激光雷达成为一个主动传感器。通过嵌入式算法处理返回的信号,以生成传感器视场内物体和地形特征的近乎即时的3D渲染。激光脉冲重复频率足以生成具有高分辨率和准确性的3D视频。传感器的高帧速率使其成为各种应用程序的有用工具,这些应用程序受益于实时可视化,例如高精度的远程着陆操作。通过立即返回目标景观的3D高程网格,Flash传感器可用于识别自主航天器着陆场景中中的最佳着陆区域。
三 相控阵
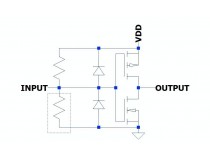
相控阵可以通过使用单个天线的微观阵列照亮任何方向。通过控制每个天线的定时(相位),可以将一个内聚信号导向一个特定的方向。
自1950年代以来,相控阵已用于雷达,同样的技术也可以用于光。大约一百万个光学天线用于在特定方向上观察特定尺寸的辐射图,该系统由精确闪光定时控制,单个芯片(或几个)取代了价值75000美元的机电系统,从而大大降低了成本。
有几家公司正在开发商用固态激光雷达装置,其中包括正在设计905 nm固态器件的Quanergy公司,尽管它们似乎在开发中遇到一些问题。
控制系统可以改变镜头的形状以启用放大/缩小功能,特定的分区可以以亚秒间隔为目标。
机电激光雷达能持续1000至2000小时,相比之下,固态激光雷达可以运行100000小时。
四 微机电设备
微机电系统(MEMS)并非全固态。然而,它们微小的外形提供了许多相同的成本优势。单个激光被指向单个反射镜上,镜子快速旋转,该反射镜可以重新定向以查看目标场的任何部分。然而,MEMS系统通常在单个平面(从左到右)中工作。要添加第二个维度,通常需要上下移动第二个镜像或者,另一个激光可以从另一个角度击中同一反射镜。MEMS系统可能受到冲击/振动的干扰,可能需要重复校准。我们的目标是创造一个小型微芯片,以加强创新和进一步的技术进步。
五 扫描仪和光学元件
图像显影速度受其扫描速度的影响,扫描方位角和仰角的选项包括双振荡平面镜、多角镜和双轴扫描仪的组合。光学选择会影响角度分辨率和可以检测到的范围,可以选择使用孔镜或分束器来收集返回信号。
六 定位和导航系统
安装在飞机或卫星等移动平台上的激光雷达传感器需要仪器来确定传感器的绝对位置和方向,这样的设备通常包括全球定位系统接收器和惯性测量单元(IMU)。
七 传感器
激光雷达使用有源传感器提供自己的光源,能源撞击物体,反射的能量由传感器检测和测量。通过记录发射脉冲和反向散射脉冲之间的时间并使用光速计算行进距离,可以确定到物体的距离。因为相机能够发射更大的闪光灯并利用返回的能量来感测感兴趣区域的空间关系和尺寸,因此Flash激光雷达可以进行3D成像。由于不需要将捕获的帧缝合在一起,并且系统对平台运动不敏感,失真较小,因此可以实现更精确的成像。
使用扫描和非扫描系统均可实现3D成像。“ 3D门控观测激光雷达”是一种非扫描激光测距系统,可应用脉冲激光和快速门控摄像头。目前,使用数字光处理(DLP)技术进行虚拟光束转向的研究已经开始。