1. 电机控制按工作电源种类划分:可分为直流电机和交流电机。按结构和工作原理划分:可分为直流电动机、异步电动机、同步电动机。不同的电机所采用的驱动方式也是不相同的,这次主要介绍伺服电机,伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因此,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,同时又与伺服电机接受的脉冲形成了呼应,或者叫闭环,进而很精确地控制电机的转动,从而实现精确的定位,可以达到0.001mm。
伺服电机相比较普通电机优势在于控制精度、低频扭矩、过载能力、响应速度等方面,所以被广泛使用于机器人,数控机床,注塑,纺织等行业,如下图所示。

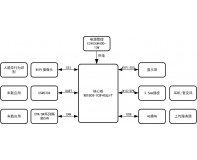
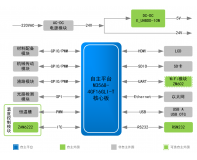
2. 传统控制平台只关注电机特性,新的运动控制平台由电机及加载系统、电机驱动程序调试系统、数据采集和电源系统组成。从电机到驱动构建出完整的硬件软件实验环境,提供全开放式的软硬件接口,具有丰富的可扩展性教学体验和全面可靠的保护措施,可做电机识别,堵转、电机效率测试、电机参数测定、电机T-N曲线测试、电机运动控制及编码器矢量转矩、无感矢量速度分析等测试,系统如下图所示。

三、PWM控制及测试结果
脉冲宽度调制是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中,脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极或MOS管栅极的偏置,来实现晶体管或MOS管导通时间的改变,从而实现开关稳压电源输出的改变,MES-100测试波形如下图所示。