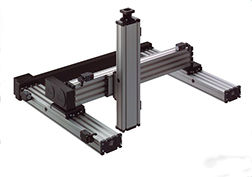
机器人定位系统是整台设备的核心,为德国bahr公司产品, X,Y,Z三坐标均选择为同步齿形带传动,单坐标重复定位精度为0.05mm,最快直线运动速度:1000mm/s。
其中X坐标轴为两根长度为1200mm,跨度为800mm的定位系统ELZ40,由同步传输器保证两根定位系统运动的同步,由一台400W伺服电机驱动。出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Y轴选用ELZ40和ELR40定位单元,由于结构要求,两个定位单元上下并排放置。ELZ40为主驱动结构,ELR40位辅助结构。两根定位系统由一台400W伺服电机驱动,出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Z轴选用ELSZ40定位系统单元,出于安装考虑,滑块需要延长,并与Y轴滑块固定在一起。,驱动定位体的伺服电机驱动和滑块安装在一起。。实际应用中我们选择了一台400W带抱闸的伺服电机,匹配了一台行星减速机。
旋转轴安装在Z轴的末端,于一台微型伺服电机带动一台精密行星减速机形成,超声波探头安装在减速机的输出端,随减速机的旋转而旋转。
3、伺服驱动系统
选用具有总线功能伺服电机。每个运动轴配有一台伺服电机及一台精密减速机,四个运动轴,共四套伺服电机和四台减速机,其中垂直运动轴为带抱闸伺服电机。
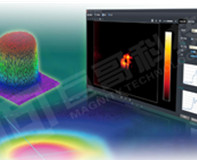
4、探伤系统
该部分由超声波探头、数据处理模块辅助水槽等组成。
5、控制系统
控制系统由PLC、触摸屏组成。该系统拥有强大的Profibus通讯功能。能够将数据实时传输给以太网,能够将控制指令以总线的方式发送给伺服系统,使整个的运动相当流畅。该系统可预置多种工件的程序,更换品种时可在触摸屏上调用相应程序。
6、安全防护装置
该机具有故障提示及报警功能,并且每次出现故障时都能准确的反映出故障具体位置,便于迅速排除故障,主要包括:机器人碰撞保护功能;工件安装到位检测;光幕安全保护。