因此,太阳能无人机的结构要精心设计,如可通过碳纤维铺层分布和铺层方向的优化设计,来克服气动弹性(空气动力和弹性结构之间的相互作用)的不良影响和阵风响应问题,避免无人机结构“气动弹性发散”和“颤振”的发生,防止可能导致结构变形发散而断裂。
3.3 适于无人机的太阳能电池
太阳能电池是太阳能无人机的动力来源。适于无人机的太阳能电池与日常用于光伏发电站和家用的太阳能电池不一样。无人机用的太阳能电池不但要求重量轻和厚度薄,而且需要有一定的柔性,以便于铺设在机翼或其他机体的外表面。

太阳能电池按结晶状态可分为两类:结晶系薄膜式和非结晶系薄膜式。
太阳能电池按材料可分为:硅晶体电池(单晶、多晶、非晶硅) 、多元化合物薄膜电池 、聚合物多层修饰电极型电池、纳米晶电池。
目前太阳能飞机上使用的多半为薄膜单晶硅太阳能电池和柔性薄膜多元化合物电池(如:砷化镓薄膜电池 、铜铟镓硒薄膜电池等)。柔性薄膜太阳能电池的制备工艺十分复杂,如多元化合物电池就需经过反应溅射、热蒸发、清洗、激光切割和封装等精细加工过程。为了适于安装于无人机表面,太阳能电池需轻、薄和柔软,电池封装要具有极好的防水蒸汽性能,还需要具有抗紫外、抗磨损、抗老化等功能。
太阳能电池的效率是决定太阳能飞机动力和承载能力的基础。所谓太阳能电池板的转换效率是指电池输出功率密度与入射光功率密度之比,也就是一定面积的太阳能电池板吸收光能后可以转化为电能的效率。目前太阳能电池板的效率通常在10%-30%,因此要不断提高太阳能电池板的效率才有望减小飞机面积或增加承载重量。

3.4 太阳能无人机的夜间航行
太阳能无人机要实现昼夜连续飞行,晚上没有太阳光要靠储能系统把白天吸收的太阳能转化的多余电能存储起来(如锂电池),以备夜间飞行使用。夜间无人机飞行要执行与白天不一样的飞行模式。夜间飞行,为了节约能源,通常采取无动力“滑翔飞行”和有动力飞行相结合的方式。由于太阳能无人机具有大展弦比机翼和轻结构特点,因此具备优良的滑翔能力。当无人机进行一定滑翔角飞行时,由于相对气流产生的“迎角”,即使没有动力,也会产生一定的升力,从而节约能量。当然,太阳能无人机必须具有先进的自主控制飞行与导航能力。夜间飞行还需要无人机设计有执行滑翔飞行的自动控制程序和不同飞行模式之间自动转换等功能。

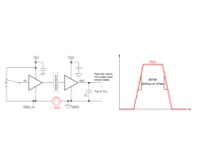
3.5 太阳能无人机的电子系统
太阳能无人机与其他无人机一样都需要先进的电子系统。目前人们普遍接受美国在“无人机系统线路图”提出的概念,用“无人机系统(UAS:Unmanned Aircraft System)”代替原来的“无人机(UAV)”的提法。换句话说,通常我们说“无人机”,应是对“无人机系统”的简称。无人机系统是指无人机空中平台及与其配套的任务设备、数据链、地面测控站、起飞(发射)回收装置以及地面保障设备等的统称。
无人机的自主飞行控制与导航系统包括集多种传感器与微处理器的控制、卫星导航接收机,执行飞行器姿态控制和规划路线导航控制,目前向智能控制发展。
无人机信息传输系统广义上包括任务载荷传感器和信息传输。任务载荷是根据不同任务使命的微型飞行器而设计的不同机载任务设备,如侦察设备、电子干扰器、气体采集器、声音传感器和其它任务传感器。通常视觉传感器是无人机最基本的任务传感器。还包括对任务设备的控制,如任务设备转动平台,跟踪目标控制模块等。信息传输包括机载信息和地面信息的数据处理。
太阳能无人机由于飞行时间更长,以及要适应昼夜飞行和其他环境影响,因此对电子系统的功能和可靠性要求更高。
4 太阳能无人机的发展