飞机称重系统也随着数字式传感器和数字式称重系统智能化的发展而发展,基于此,本文通过对数字式智能飞机称重系统原理和秤台结构,结合力矩平衡原理进行介绍和分析,提出了采用数字式智能飞机称重系统结构特点和运用力矩平衡原理对飞机机轮轮距(即飞机在秤台上的实际力作用点位置)准确测量的方法,并给出了该方法应注意的事项,从而保证了准确、快捷、方便的测量飞机机轮轮距。相信该方法也可向诸如汽车、火车等其他物体的轮距或力的作用点位置的测量发展,同时也使飞机称重向数字化、智能化、自动化和高精度的发展成为可能。
1 飞机机轮轮距测量的现状、力矩平衡原理和数字式智能飞机称重系统的特点
1.1 飞机机轮轮距测量现状
测量飞机机轮轴中心两点连线长度的工作,通常需要测定其水平距离,即飞机机轮轴中心两点连线投影在某水平基准面上的长度。目前飞机机轮轮距测量从最早的钢卷尺、皮尺等传统的测距工具向光学、磁波测距仪、电子全站仪、电子水准仪以及全能型和激光智能化方向发展,测量精度也越来越高。但再高的测量精度也仅仅是飞机机轮轮距的几何位置尺寸,而不是飞机机轮实际作用在地面或称重平台上力的作用点的位置尺寸,飞机进行重量重心测量时采用的力矩平衡原理,其需要的是实际力的作用点的位置尺寸,因此目前的测量方法影响了飞机重量以及重心测量的精度。
1.2 力矩平衡原理
力矩可以使物体向不同的方向转动,如果这两个力矩的大小相等,杠杆将保持平衡,这是初中学课本中的杠杆平衡条件,是力矩平衡的最简单的情形;如果把物体向逆时针方向转动的力矩规定为正力矩,向顺时针方向转动的力矩规定为负力矩,则有固定转动轴的物体的平衡条件是力矩的代数和为零,即作用在物体上多个力的合力矩为零的情形叫做力矩的平衡。
在工程实际中,人们一般根据力矩平衡原理方程,通过多个测力传感器支撑物体处于平衡状态,以确定各个支撑点力的大小,根据力矩的方向(逆时针或顺时针)以确定力的方向,通过测量以确定各个支撑点力作用线的位置。飞机重量重心测量就是采用力矩平衡原理进行测量,本文也将论述采用力矩平衡原理和采用实际应用的数字式智能飞机称重系统的称重平台对飞机机轮轮距进行测量的方法,该方法所测得的轮距为飞机机轮在各称重平台上力的实际作用点的相对位置尺寸,符合飞机重量重心测量的要求。
1.3 数字式智能飞机称重系统的特点
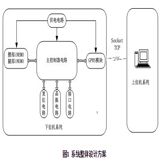
飞机重量重心测量就是采用力矩平衡原理进行测量。利用力矩平衡原理测量飞机重量及重心的方式目前有三种方式:平台式测量方式、悬挂式测量方式和千斤顶式测量方式。无论何种测量方式都是通过3点(见图1)、4点或多支撑点的测力传感器感知力值的大小,再通过采集系统对传感器感知的力值数据信号进行采集,通过计算机软件对该信号的解算,便得到飞机重心的坐标值。