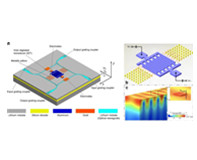
图4天线仿真模型
天线俯仰面增益方向图如图5所示

图5 俯仰面增益方向图
线阵增益为15.1dBi,副瓣电平-22.6dB。
将图4的线阵模型等间距排列6行组成如图6所示的面阵

图6 面阵仿真模型
该面阵用于实现水平面方向图的波束赋形。
2.2 PSO粒子群算法优化激励幅度相位
粒子群的基本概念是来自于鸟群觅食行为的研究[3]。与遗传算法类似,粒子群算法也是一种随机搜索方法,不同的是,粒子群优化算法没有选择、交叉、变异等复杂过程,而是依靠个体间的协作来寻取最优解。每个粒子通过跟踪粒子本身找到的最优解Pbest和群体找到的最优解Gbest,更新离子的位置和速度,不断向最优解靠近,最终达到最优解。粒子群算法优化流程图如图7所示

图7 算法优化流程图
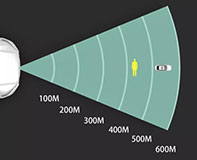
从防撞雷达威力图提取出波束赋形的目标方向图,通过PSO优化算法对图6中阵列天线激励幅相值得优化,实现对目标方向图的赋形。在HFSS仿真软件中输入粒子群算法优化得到的激励幅相值,得到仿真方向图与目标方向图如图8所示

图8波束赋形方向图
从图8可见仿真结果与目标方向图吻合较好,说明粒子群算法优化出的结果可靠。
2.3功分网络的设计
2.2节确定了各线阵激励的幅相值,但图8里的仿真方向图是理想的,现实中需要通过1分6的功分网络来将其实现。常用的功分器有Wilkinson功分器和T型节功分器;Wilkinson功分器只能组成并馈网络,这种网络具有较大的损耗且占用面积大,不利于小型化;而由T型节组成的串馈功分网络具有损耗低占用面积小的优势,更适合于实现3.2节中波束赋形的幅相激励。
2.3.1理论分析
该串馈网络依靠阻抗变换段实现波束赋形的激励幅度,通过改变输出馈线的长度实现波束赋形的激励相位;串馈网络等效电路如图9所示