信息融合起初叫做数据融合(data fusion),起源于1973年美国国防部资助开发的声纳信号处理系统,在20世纪90年代,随着信息技术的广泛发展,具有更广义化概念的“信息融合”被提出来,多传感器数据融合MSDF (Multi-sensor Data Fusion)技术也应运而生。
数据融合主要优势在于:充分利用不同时间与空间的多传感器数据资源,采用计算机技术按时间序列获得多传感器的观测数据,在一定准则下进行分析、综合、支配和使用。获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它各组成部分更为充分的信息。
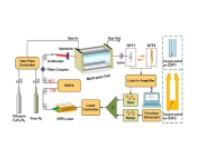
一般地,多源传感器数据融合处理过程包括六个步骤,如下图所示。首先是多源传感系统搭建与定标,进而采集数据并进行数字信号转换,再进行数据预处理和特征提取,接着是融合算法的计算分析,最后输出稳定的、更为充分的、一致性的目标特征信息。

利用多个传感器所获取的关于对象和环境全面、完整信息,主要体现在融合算法上。因此,多传感器系统的核心问题是选择合适的融合算法。对于多传感器系统来说,信息具有多样性和复杂性,因此,对信息融合方法的基本要求是具有鲁棒性和并行处理能力,以及方法的运算速度和精度。以下简要介绍三种种常用的数据融合算法,包括贝叶斯统计理论,神经网络技术,以及卡尔曼滤波方法。
贝叶斯统计理论

英国数学家托马斯·贝叶斯(Thomas Bayes)在1763年发表的一篇论文中,首先提出了这个定理。贝叶斯统计理论是一种统计学方法,用来估计统计量的某种特性,是关于随机事件A和B的条件概率的一则定理。所谓"条件概率"(Conditional probability),就是指在事件B发生的情况下,事件A发生的概率,用P(A|B)来表示。根据上述文氏图,容易推导得到:P(A ∩ B) = P( A | B) * P(B) = P( B | A) * P(A),由此可以推导出条件概率的公式,其中我们把P(A)称为先验概率(Prior probability),即在事件B发生之前,我们对事件A发生概率有一个认识。
举个简单的例子,视觉感知模块中图像检测识别交通限速标志(Traffic Sign Recognition, TSR )是智能驾驶的重要一环。TSR识别过程中,交通限速标志牌被树木,灯杆等遮挡是影响识别的主要干扰。那么我们关心的,是交通限速标志被遮挡的情况下,检出率有多少呢?这里我们定义事件A为交通信号标志正确识别,事件为交通信号标志未能识别;B为限速标志被遮挡,事件为限速标志未被遮挡。

根据现有算法,可以统计出事件A正确识别交通限速标志的概率,此处事件A的概率称为先验概率。通过查看视觉感知模块的检测视频录像,我们可以统计检测出来的交通限速标志中有多少被遮挡,有多少是没被遮挡的,还可以统计漏检的交通限速标志中,有多少是被遮挡的,有多少是没被遮挡的。因此,我们可以得到下面值:

由此,可以推算出被遮挡的情况下,正确识别限速标志的概率: