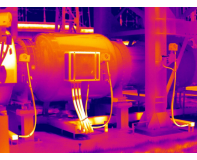
视觉传感器是一种相当于人眼的传感器,根据铁路弹条生产线工艺的特点,弹条搬运视觉系统采用二维视觉,在二维平面上测量出所有必要的数据,作为指导机器人抓取和判断产品是否合格的依据。根据生产线工件的特点,视觉系统采用主动光源检测。由于工件是高温工件,其本身能够发出辐射光,用工业相机对其进行拍照,使用滤镜滤除环境干扰光和辐射干扰光,达到良好的图像效果,得到物体的二维图像,从而计算出工件在平面上的位置和偏移角度。由于高性能计算机的应用及算法优化,增强了视觉系统的精度和处理速度,增强了对工厂恶劣环境的适应性,使之能在工厂的恶劣环境下稳定运行。
9.1视觉软件功能概述
.标定功能,以得到物理尺寸信息。
.接收PLC的触发信号,进行采图、检测、测量。
.在界面上显示图像及检测结果:合格/不合格;测得的尺寸信息。
.将检测结果和完成结果通过相机的IO口输出给PLC。
.执行相关系统状态的显示,如系统时间、检测个数统计等。
.将测量数据,机器人偏远数据保存在当天的Excel文件中。
.调节相机参数的交互功能
9.2使用环境
相机:PointGrey 20S4m200万黑白相机;
镜头:Computer 8mm + 红外滤光片;
1394卡:64位1394卡;
PC配置:CPU2.5GHZ以上;内存1GB以上;显存64MB以上;PCI64bit;
插槽;彩色显示器;WindowsXP操作系统;Microsoft Studio6.0开发环境。
10.MOTOCOM通讯软件
二.机器人弹条搬运系统工艺流程
1.上料工位
上料工位系统是由一台温度传感器和一台工业相机组成。温度传感器具有三通道信号输出,检测工件当前温度,通过相应的通道发送给机器人系统,只有满足工艺要求的温度,才能作为合格产品进入加工工序。工业相机对工件进行坐标定位和测量,以确定工件尺寸和当前位置,采集到的数据通过MOTOCOM发送给机器人,以指导机器人进行抓取,对于温度和尺寸满足工艺要求的工件,机器人抓出送入压机进行冲压作业;对于不合格的产品,机器人抓出进入废品回收程序。

2.第一冲压工位