系统是由一台热传感器和两台工业相机组成。当冲压完成后,视觉系统对工件进行坐标定位和测量,以指导机器人平移抓取位置,补偿由于冲压机和模具造成的尺寸偏差。不合格的产品,送入废品回收程序,合格产品送入下道工序。
3.第二冲压工位
系统是由一台热传感器和一台工业相机组成。由于冲压机的精度和模具的原因,这个工位偏差很大,视觉系统除了要进行工件测量和坐标定位外,还要算出工件的偏移角度。机器人以视觉系统的数据为依据,补偿偏移角度和位置,进行抓取作业,使机器人把工件放置到下道模具的正确位置。

4. 第三冲压及成品工位
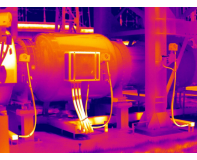
系统是由一台三通道温度传感器和两台工业相机以及检测台清扫装置组成。金属材料性能的主要决定因素是淬火工艺,而淬火工艺的核心是温度控制。由于机器人搬运作业节拍稳定,在进入加工工序的温度稳定时,可以保证进入淬火工艺的温度是恒定的。温度传感器的使用,使温度控制更加智能和稳定,基于以上控制,每个成品都具有相同的机械性能。视觉系统的两台工业相机成90度夹角安装,进行俯视和侧视拍摄。取特征点位置为测量点,进行多位置测量,检测出数据指标,与标准数据进行对比,判断产品是否合格。合格产品进入淬火工序,不合格产品进入废品回收程序,至此机器人弹条搬运完成一个完整的流程。
三.机器人视觉搬运系统优越性
目前我国大多数工厂中,带有高度重复性的搬运工作仍然靠大量人工来完成,给工厂带来巨大的人工成本和管理成本,并难以保证生产线的高速度和零缺陷。机器人及视觉系统的使用,有效地解决了这一问题。系统的优越性能,为提高弹条生产效率和产品质量,提供了有效保证。
弹条搬运生产线是全自动生产线,工艺流程中不需要人的干预,线体周边使用安全栏防护,门上装有安全锁,只要有人进入工作区域,机器人就会报警停止,最大限度的保证了人身安全。机器人生产节拍稳定,生产数量在触摸屏实时显示,产品周期明确,生产纲领安排更加容易控制。机器人与视觉系统的使用,降低了人工对产品质量和稳定性的影响,保证了产品的一致性。
四.总结
机器人视觉系统在弹条生产线的应用,在铁路弹条生产中开了一个先河。经过实践证明,该机器人视觉系统提高了产品质量和速度,最大限度的保证了人身安全,运行稳定可靠,极大的拓展了机器人视觉系统的应用范围。