高灵敏度iDAR平台通过允许在一帧内进行智能拍摄调度来加快重访速度。iDAR不仅可以在传统架构内多次询问位置或目标,而且还可以维持背景搜索模式,同时覆盖其它智能拍摄结果。例如,iDAR传感器可以快速连续(30微秒)安排对目标进行两次重复拍摄。这些多重询问可以与用户(人类或计算机)的需求进行情景集成,从而提高置信度,减少延时,增加探测距离。
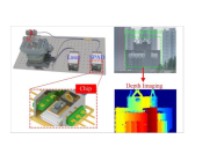
这些额外的询问与数据相关。例如,出现低置信度时重新探测目标,并且期望快速验证或拒绝,启动次级数据和测量。在图1中,传统被动激光雷达典型帧率为10Hz。对于传统被动激光雷达,这就是目标的重访速度。现在,借助AEye的iDAR技术,目标重访速度与帧率有所不同,并且对关键点/目标的重访时间差可以低至数十微秒,轻松实现比传统被动激光雷达快100倍到1000倍的性能。
这意味着使用动态对象重新访问功能的感知工程团队可以创建一种感知系统,该系统至少比传统被动激光雷达快一个数量级,且不会破坏背景扫描模式。我们认为,此功能对于实现Level 4和Level 5自动驾驶汽车来讲是非常重要的,因为车辆将需要处理复杂的边缘计算情况,例如识别朝着车辆前灯迎面驶来的行人或横穿车辆行驶路径的平板式半挂车。
")
图1:先进的高灵敏度激光雷达利用智能扫描模式来实现目标重访间隔(Object Revisit Interval),如图(B)所示AEye iDAR的随机扫描模式,与典型固定模式激光雷达(A)的“重访间隔”进行比较。可以看出,iDAR(B)能够在一帧内对车辆进行八次目标重访/探测,而典型的固定模式激光雷达(A)只能实现一次。
因此,在“搜索、采集和采取行动”的架构中,加快目标重访速度可以加快采集速度,因为这可以识别并自动重访目标,从而在场景中描绘出更完整的画面。最终允许传感器进行目标属性分类,并高效地询问和跟踪潜在威胁。
实际用例1:正面探测
当您驾驶车辆时,眼前的世界会在十分之一秒之内发生巨大变化。实际上,两辆车以每小时100公里速度相向而行时,0.1秒后距离就减少5.5米。通过提高目标重访速度,由于在两次拍摄之间目标明显移动的可能性降低,增加了下一次拍摄到相同目标的可能性。这有助于用户解决“目标对应问题”,确定动态场景的一个快照的哪些部分对应于同一场景另一快照的哪些部分。做到这一点的同时,使用户能够快速建立置信度更高的统计数据,并生成下游处理器可能需要的聚合信息,例如目标的速度和加速度。有选择地提高目标重访速度,同时降低对稀疏区域(如天空)的重访率,显著帮助实现更高层次的推测算法,从而使感知和路径规划系统能够更快地确定最佳的自动决策。
实际用例2:横向探测
横向进入场景的车辆最难追踪。即使是多普勒雷达,在这种情况下也很难应对。但是,当探测已成为采集过程的一部分时,有选择地分配拍摄次数以提取速度和加速度,则会大大减少每帧所需的拍摄次数。iDAR增加二次探测,对每个目标探测建立速度估算,总拍摄次数仅增加1%。而使用固定扫描系统获得速度,所需的拍摄次数增加一倍。速度和特征拍摄消除了歧义,允许更有效地利用资源,让自动驾驶更安全。
传统指标二:固定视场的固定分辨率
扩展:瞬时分辨率(Instantaneous Resolution),增加激光雷达同一帧内关键区域的分辨率
传统的分辨率,假定以恒定的模式和均匀的功率对视场内目标进行扫描。这对于收集能力较差、智能级别较低的被动传感器来说,非常有意义。另外,传统的分辨率是假设场景内的显著信息在空间和时间上是统一的,我们知道这并不正确,这对于行驶中的车辆来讲更不正确。但是,正是由于这些假设,传统激光雷达系统会不加选择地从车辆周围收集千兆字节的数据,并将这些输入发送到CPU进行抽取和解释。该数据中约70%~90%是无用或冗余,需要被过滤。此外,传统激光雷达系统对任何区域都实施相同级别的功率,相当于对车辆的行进路径的目标提供与对天空相同的功率。这样的处理效率极低。
作为人类,我们不会平均地“吸收”周围的一切。我们的视觉皮层会过滤无关信息,例如飞过头顶的飞机,同时(而不是连续地)将我们的眼睛聚焦在特定的兴趣点上。集中在一个兴趣点,将其它次要目标放用余光察觉。这就是所谓的“Foveation视觉模型”,目标被分配了“更高浓度”的视锥细胞,因此可以更加生动地看到它。